minimoc
mini motor controller
schematic and board files are licensed CC-BY-SA-3.0
source code licensed under the GNU Public License v3
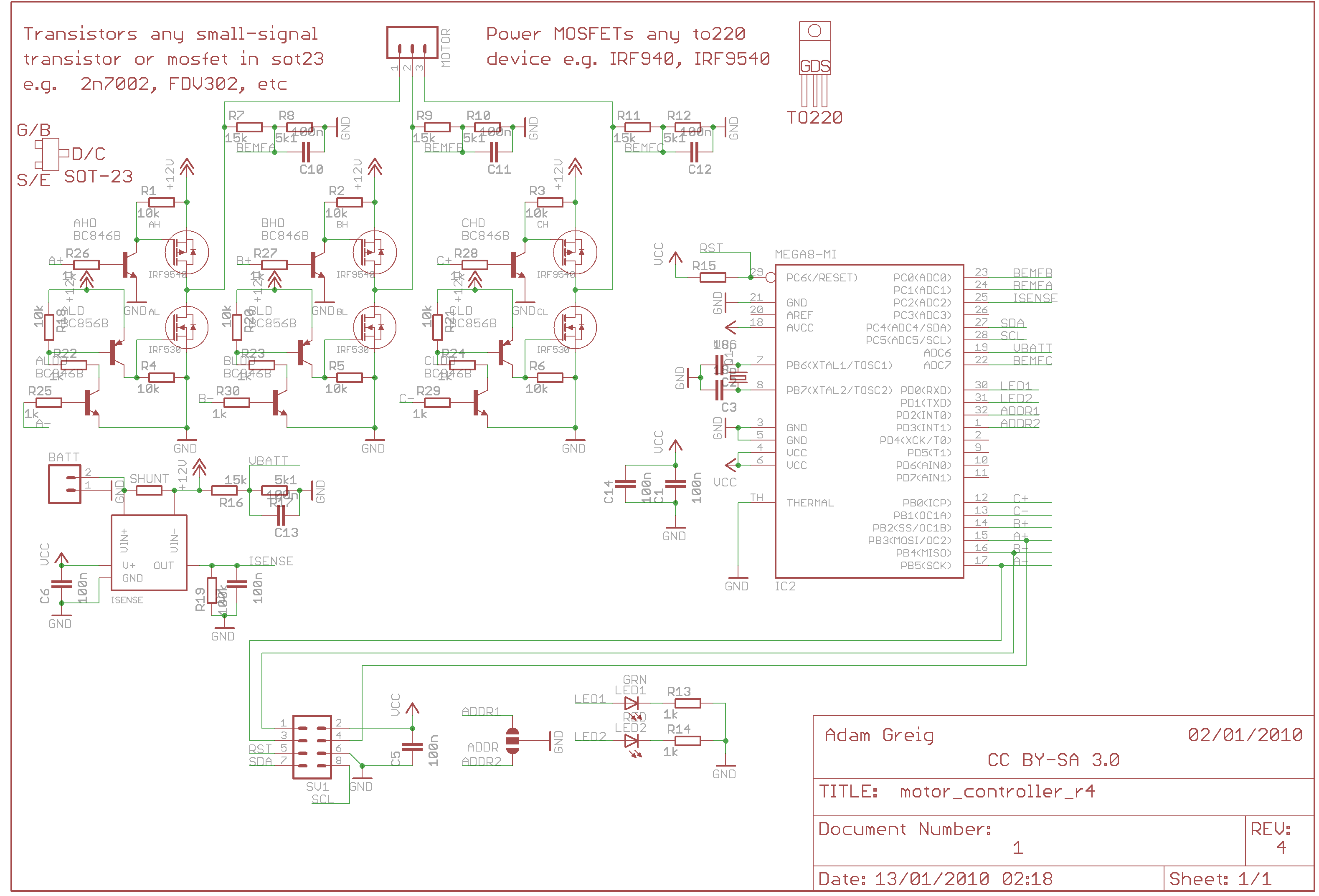
an atmega168 generates pwm outputs to three half-h-bridges which each drive one phase
of the brushless motor. a voltage divider returns that phase's back emf to the atmega
when that phase is not being driven, which the atmega uses to calculate the commutation
time. a shunt resistor and amp is used for current monitoring. an i2c interface talks
to the main system. the i2c address is settable from four options by a solder jumper.
there are some status LEDs. the mosfets are to220 packages and are each driven by
transistors. the board is about 0.9" by 1.7". screw terminals connect to the battery
and motor, or you can just solder wires into the holes. drc clearance is 7/7 with 12mil
minimum drill size. seeedstudio and goldphoenix will both manufacture this board (though
you will need to pay goldphoenix a bit more for the 12mil drill hits).
eagle .sch
eagle .brd
schematic png
board png
code on github
{kind=link}
{kind=link}